AutoTURN Pro 2024 Help
Generates a turn simulation using an entrance tangent, arc, and exit tangent, with input for the turn radius and the amount of turn sweep. The sweep can also be set by selecting an existing element. The tangents can be lengthened or shortened by moving the mouse in the direction of the tangent.
For forward maneuvers, the  Switch to Reverse button changes the maneuver to a reverse maneuver.
Switch to Reverse button changes the maneuver to a reverse maneuver.
For reverse maneuvers, the  Switch to Forward button changes the maneuver to a forward maneuver.
Switch to Forward button changes the maneuver to a forward maneuver.
Sets the speed at which the vehicle is traveling.
Note:
When this checkbox is not selected, the vehicle is assumed to be starting the maneuver at the speed specified. The vehicle’s lock to lock time and speed are used to create a transition zone in the generated path. In this zone, the vehicle’s steering wheels turn at a linear rate until they reach the angle at which the mouse position can be reached.
When this checkbox is selected, the vehicle is assumed to be starting the section from a complete stop. This allows the steering wheels to be turned while the vehicle is stopped, allowing the vehicle to proceed at a constant steering angle to the mouse position. This option is only available in the Generate Arc Path and Generate Corner Path SmartPath Tools and only at very slow speeds (6 mph (10 km/h) or less), and should only be used when maneuvering space is at a premium.
Note: For reverse maneuvers, the Turn Wheels From Stop checkbox is selected automatically, and the checkbox is not available.
The time (in seconds) that an average rider would normally take to steer from one maximum steered position on one side to the maximum steered position on the other side while also accounting for the change in lean angle between the two maximum steered positions.
It is used to approximate the rate at which an average rider may negotiate turns from a tangent or from one curve to another curve of a different radius, its default value is set to one second based on field test observations.
Select one of the following radius types:
The Radius value is displayed for this type.
An edit box is provided to set the desired radius value for the selected radius type.
Note: AutoTURN Pro will not allow a radius to be set to a smaller value than the minimum radius capabilities for the current vehicle at the current speed.

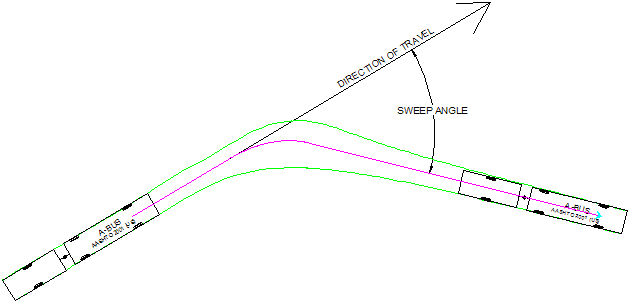
The sweep angle is defined as the angle between the direction of travel and the exit tangent (new heading). For corner path turn simulations (see Generate Corner Path), the centerline of the vehicle will eventually become parallel with the exit tangent if the exit tangent is long enough - the longer the exit tangent is, the closer to zero the steering angle becomes. For oversteer corner path turn simulations (see Oversteer Corner Path), the centerline of the vehicle is always parallel with the exit tangent. To set the sweep angle, type the desired value in the corresponding edit box or click the Select Sweep Angle button, and then pick an element in the drawing area.
Example of a sweep angle
Select this checkbox, choose the desired type of offset, and then specify the distance value to generate offset envelopes to each side of the bicycle for each section of the simulation.
Displays the superelevation (i.e., slope) of the road surface. This value is considered in determining the minimum turn radius, and is only available at speeds of 10 mph (16 km/h) or greater. Select the Set checkbox to override the default value.
Note: In the SmartPath Tools, superelevation is limited to the range of -0.1 to 0.1.
Click Shrink to reduce the SmartPath Tools dialog box to its minimum size to increase the working space in the drawing area.
Click Expand to return the SmartPath Tools dialog box to its full size.
Deletes the last generated section.
Hint: Alternatively, an undo operation can be performed by clicking inside the wheelbase of the last vehicle position generated.