TORUS 2025 Help
The fastest path is the vehicle movement through the roundabout at the fastest speed possible. TORUS uses two general methods to calculate fastest path. One method approximates the speed based on the radii approximated along the fastest paths. The other method approximates the entry and exit speed based on acceleration and deceleration rates along the fastest path.
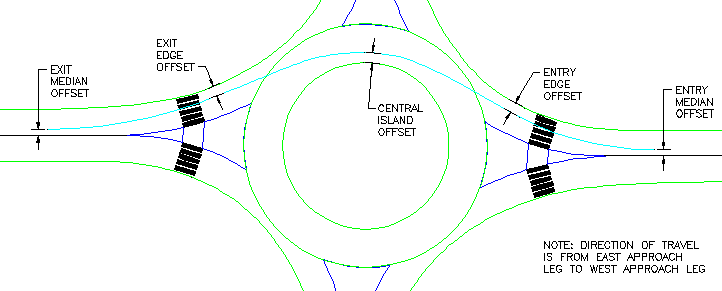
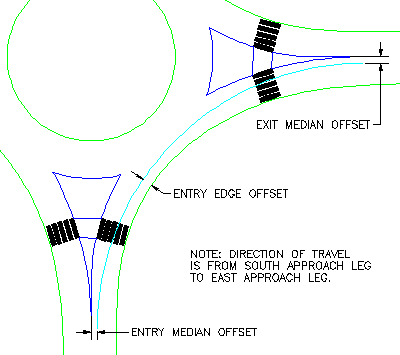
To calculate the fastest through path (a combination of R1, R2, and R3) and the fastest turn paths (V4 and V5), TORUS approximates the fastest paths by using the minimum median, edge, and central island critical offsets as constraints. The fastest through path is approximated by applying the minimum critical offsets at the internal computed location along the path, and the fastest turn paths are approximated by applying the minimum critical offsets to the single radius arc. For the fastest turn paths, the R4 value is always related to the turn which requires circulating the central island, and the R5 value is always related to the turn which does not require circulating the central island. The V1, V2, V3, V4, and V5 speeds are calculated using the AASHTO equation below based on the approximated R1, R2, R3, R4, and R5 radii respectively:
| Metric units | U.S. customary |
|
V = design speed, km/h R = radius, m e = superelevation, m/m f = friction factor |
V = design speed, mph R - radius, ft e = superelevation, ft/ft f = friction factor |
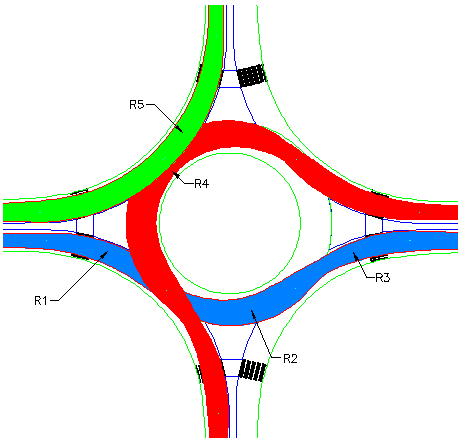
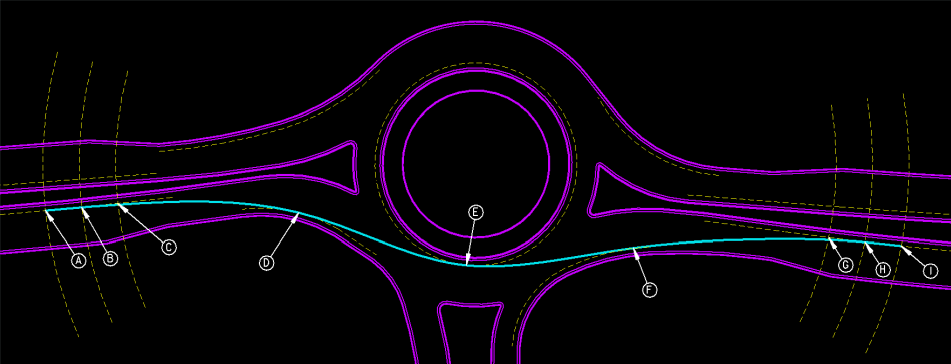
Fastest Path Radii
Fastest Through Path (R1, R2, and R3)
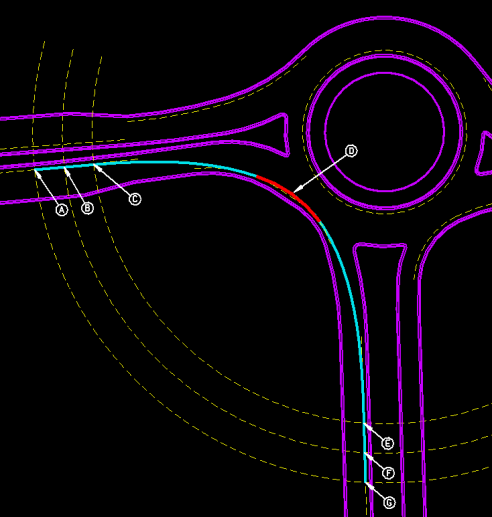
Fastest Turn Path (R5)
Note:
TORUS implements an alternate method in calculating the entry speed called V1a. It computes the entry speed by evaluating the circulating speed, deceleration rate, and path distance along the vehicle path between the entry-side crosswalk and the midpoint of the circulatory path. The following equation is used:
| Metric units | U.S. customary | ||
V1 = VEntry design speed, km/h V2 = VInt. design speed predicted based on path radius, km/h a12 = deceleration between the point of interest along VEntry path and the midpoint of VInt. path = 1.3 m/s2 d12 = distance along the vehicle path between the point of interest along VEntry path and the midpoint of VInt. path, m |
V1 = VEntry design speed, mph V2 = VInt. design speed predicted based on path radius, mph a12 = deceleration between the point of interest along VEntry path and the midpoint of VInt. path = 4.2 ft/s2 d12 = distance along the vehicle path between the point of interest along VEntry path and the midpoint of VInt. path, ft |
TORUS also implements an alternate method in calculating the exit speed called V3a. It computes the exit speed by evaluating the circulating speed, acceleration rate, and path distance along the vehicle path between the midpoint of the circulatory path to the exit-side crosswalk. The following equation is used:
| Metric units | U.S. customary | ||
V3 = VExit design speed, km/h V2 = VInt. design speed predicted based on path radius, km/h a23 = acceleration between the midpoint of VInt. path and the point of interest along VExit path = 2.1 m/s2 d23 = distance along the vehicle path between midpoint of VInt. path and point of interest along VExit path, m |
V3 = VExit design speed, mph V2 = VInt. design speed predicted based on path radius, mph a23 = acceleration between the midpoint of VInt. path and the point of interest along VExit path = 6.9 ft/s2 d23 = distance along the vehicle path between midpoint of VInt. path and point of interest along VExit path, ft |
The fastest path can be evaluated for a software generated roundabout (see Generate Roundabout) or a user-drawn roundabout. Depending on the type of the roundabout for which you want to have the fastest path evaluated, see one of the following:
Note: The V1a and V3a computations are not considered for evaluating fastest path on a user-drawn roundabout.
The fastest path is the vehicle movement through the roundabout at the fastest speed possible. The FDOT fastest path method approximates the speed based on the radii approximated along the fastest paths while the exit speed is based on the acceleration rate on the exit curve.
To calculate the fastest through path (a combination of R1, R2, and R3) and the fastest turn paths (V4 and V5), TORUS approximates the fastest paths by using the minimum median, edge, and central island critical offsets as constraints to create a spline. The fastest through path is approximated by applying the minimum critical offsets at the internal computed location along the path, and the fastest turn paths are approximated by applying the minimum critical offsets to the spline. For the fastest turn paths, the R4 value is always related to the turn which requires circulating the central island, and the R5 value is always related to the turn which does not require circulating the central island. The V4 speed is based on the offset of the central island radius. The V5 speed is taken from measuring the best fit R5 arc on the right turn spline. The V1, V2, V3, V4, and V5 speeds are calculated using the equation below based on the approximated best fit R1, R2, R3, R4, and R5 radii respectively:
| U.S. customary | |
V = design speed, mph R = radius, ft e = superelevation, ft/ft |
The V3 speed is determined using the equation below:
| U.S. customary | |
V3 = exit speed, mph V3phase = V3 speed predicted based on path radius, mph V2 = circulatory speed for through vehicles predicted based on path radius, mph a23 = acceleration between the midpoint of V2 path and the point of interest along V3 path = 6.9 ft/s2 d23 = distance along the vehicle path between midpoint of V2 path and point of interest along V3 path, ft |
FDOT Fastest Through Path
FDOT Fastest Turn Path