TORUS 2025 Help
The fastest path is the vehicle movement through the adaptive roundabout at the fastest speed possible.
TORUS calculates the fastest through paths (a combination of REntry, RInt. (RIntermediate), and RExit) and the fastest turn paths by approximating the fastest paths by using the specified critical offsets (entry median, exit median, central island, entry edge, and exit edge) to the tire tracks of the chosen design vehicle (which must be a one part vehicle - typically a passenger car) as constraints. The fastest through path is approximated by applying the minimum critical offsets at the internal computed location along the path, and the fastest turn paths are approximated by applying the minimum critical offsets to the single radius arc. The fastest path speeds can be displayed in one of two ways:
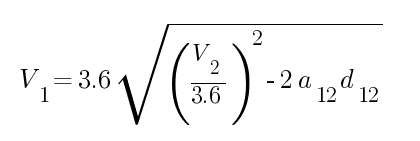
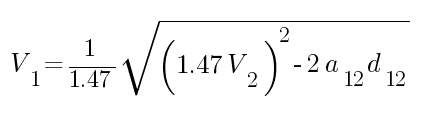
The decelerating speeds are calculated in the entry approach leg up to the midpoint of RInt. using the following equations:
| Metric units | U.S. customary | ||
V1 = VEntry design speed, km/h V2 = VInt. design speed predicted based on path radius, km/h a12 = deceleration between the point of interest along VEntry path and the midpoint of VInt. path = 1.3 m/s2 d12 = distance along the vehicle path between the point of interest along VEntry path and the midpoint of VInt. path, m |
V1 = VEntry design speed, mph V2 = VInt. design speed predicted based on path radius, mph a12 = deceleration between the point of interest along VEntry path and the midpoint of VInt. path = 4.2 ft/s2 d12 = distance along the vehicle path between the point of interest along VEntry path and the midpoint of VInt. path, ft |
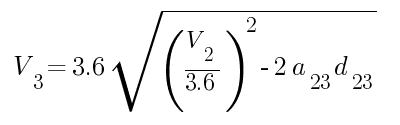
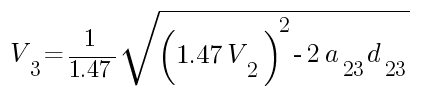
The accelerating speeds are calculated in the exit approach leg after the midpoint of RInt. using the following equations:
| Metric units | U.S. customary | ||
V3 = VExit design speed, km/h V2 = VInt. design speed predicted based on path radius, km/h a23 = acceleration between the midpoint of VInt. path and the point of interest along VExit path = 2.1 m/s2 d23 = distance along the vehicle path between midpoint of VInt. path and point of interest along VExit path, m |
V3 = VExit design speed, mph V2 = VInt. design speed predicted based on path radius, mph a23 = acceleration between the midpoint of VInt. path and the point of interest along VExit path = 6.9 ft/s2 d23 = distance along the vehicle path between midpoint of VInt. path and point of interest along VExit path, ft |