AutoTURN Pro 2024 Help
Places a forward turn simulation using the current vehicle based on following selected path elements with the center of the steering axle group (a traditional centerline path follow turn simulation) or by offsetting the turn simulation a specified distance relative to the tires envelopes (an offset turn simulation).
Note:
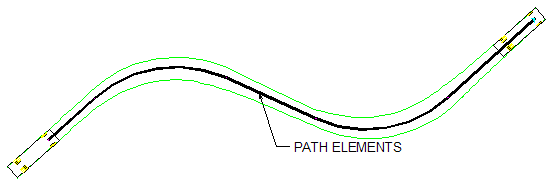
Example of a Centered Place Adaptive Simulation
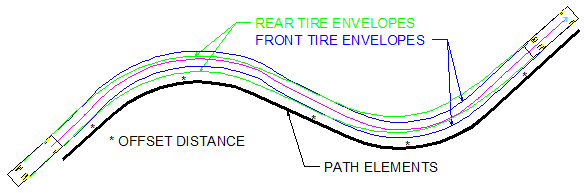
Example of an Offset Place Adaptive Simulation
Click this button to select the last pre-drawn path that was selected for use with this tool.
Indicates which type and direction of turn simulation is being placed:
Cites the library and name of the vehicle used in the simulation.
Click  Select Vehicle to change the vehicle used in the simulation.
Select Vehicle to change the vehicle used in the simulation.
This is the distance between the selected path elements and the closest tire envelope in the turn simulation at any given point in the turn simulation. How this value is measured depends on the setting of the Use Smooth Transitions checkbox:
When the Use Smooth Transitions checkbox is cleared, the offset is maintained from the tire track (front or rear) which is closest to the selected path elements.
When the Use Smooth Transitions checkbox is selected, the offset is maintained from the selected Simulation Envelope to the selected path elements.
Select this option to place the offset turn simulation with smooth transitions between changes in direction. This option generally makes for a more natural turn simulation.
Select which type of simulation envelope is measured against to maintain the Offset dimension:
This value controls how much variance there is in the Offset dimension.
This is the minimum radius used to calculate the arcs in the centerline vehicle path.
This setting specifies where in the turn simulation the oversteer is applied. Move the slider towards the left to apply the oversteer nearer to the beginning of the turns or to the right to apply the oversteer nearer to the end of the turns in the simulation.
Select this checkbox to link the turn simulation to the path element. When the path element changes (e.g., when grip editing is performed via AutoCAD/MicroStation commands), the turn simulation will update to reflect the changes in geometry.
Note: This option is only available for polyline/complex chain or alignment path elements.
If the vehicle’s steering lock or articulating angle is exceeded at any point along the path, the simulation will terminate at the point where the angle was exceeded. The exceeded angle will also be displayed as in the following illustration.
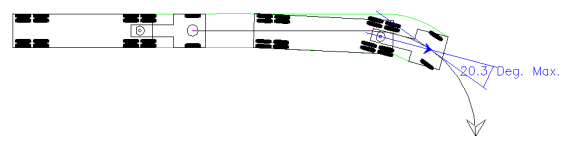
Example of a simulation where the steering lock angle was exceeded
In the event that an angle is exceeded during the course of a simulation, delete the simulation, increase the radius of the arc where the simulation stopped (or otherwise alter the path), and then pick the path and place the simulation again. It is suggested that turn radii are of at least the minimum centerline turning radius for the vehicle.